Karl-Heinz Hochhaus
Die Automation auf deutschen Schiffen begann 1964 mit zentralisierten Systemen u. a. mit dem Kühlschiff „Polarstern“. Etwa ab 1985 wurden dezentrale Automationssysteme eingesetzt. An einigen Beispielen wird der heutige Stand dargestellt. Dieser Überblicksbeitrag beruht weitgehend auf Arbeiten und Veröffentlichungen der Mitarbeiter des Arbeitsbereiches IHilfsmaschinen und Automation und nach der Umbennennung in Institut für Elektrische Energiesysteme und Automation an der TU Harburg im Handbuch der Werften (Hansa Verlag) und Handbuch Schiffsbetriebstechnik (Seehafen Verlag) von 1970 bis 2010.
Der Artikel wurde in der Hansa Nr. 1/2012 veröffentlicht.
Abb. 1: Das Kühlschiff „Polarlicht“ der Hamburg Süd (Baujahr 1964, Bauwerft Blohm & Voss) mit teilautomatisiertem Hauptdieselmotor und vollautomatischer Ladungskühlanlage
Erste Antriebsanlagen von Handelsschiffe wurden in Deutschland vor 45 Jahren mit Automationsanlagen ausgerüstet und es wurden in den folgenden 10 Jahren wertvolle Erfahrungen mit diesen Anlagen gesammelt. Zu dieser Zeit gab es nur wenige Reedereien, die diese innovativen Schiffe für den wachfreien Maschinenbetrieb in Dienst nahmen. Auch für die Klassifikationen waren diese Systeme Neuland. Die Zahl der Messstellen zur Überwachung der Anlagen, die Normen und Definitionen der regelungstechnischen Begriffe, sowie die Redundanzen für wichtige Systeme wurden gemeinsam von den Herstellern, den Werften und den Reedereien in Abstimmung mit den Klassifikationen festgelegt [1, 2].
1. Rückblick
Hinzu kam, dass sich die technischen Besatzungen auch bei großen Störungsfällen selbst helfen mussten und die Experten und das Servicepersonal des Herstellers frühestens im nächsten Hafen eingreifen konnten. Zu dieser Zeit wurden die benötigten elektronischen Steuerungen und Regelungen aus diskreten Bauteilen (Transistoren, Dioden, Widerstände und Kondensatoren) aufgebaut und auf Steckkarten zusammengefasst. Ende der 1960ger Jahre wurden integrierte Schaltkreise eingeführt, wodurch sich der Raumbedarf und noch wichtiger, die Zuverlässigkeit aufgrund reduzierter Lötstellen erhöhte.

Abb. 2: Norasia Samantha (Foto Dr. Hochhaus)
Der Einsatz von hoch integrierten Schaltkreisen und Speichern führte zu kleinen Rechnern (Mikroprozessoren), die auf Steckkarten für verschiedene Aufgaben genutzt werden konnten. Damit konnten je nach Programmierung mit den gleichen standardisierten Bausteinen und Steckkarten verschiedene Aufgaben erfüllt werden. Damit wurde der Schritt von der fest verdrahteten Steuerung zur frei programmierbaren Steuerung vollzogen, die ab Ende der 1970ger Jahr in die Schiffstechnik eingesetzt wurden [3, 4, 5]. Jetzt wurden die Sollwerte, Grenzwerte, Abfragen, Abläufe und Entscheidungen in Programmen abgelegt, die als Software im Gegensatz zu den Sensoren und Stellgliedern (Hardware) bezeichnet wurde.
Schiff der Zukunft
Es waren Schiffe für deutsche Reeder, die sowohl mit Dieselmotoren („Polarlicht“, „Polarstern“ Bauwerft Blohm & Voss) als auch mit Dampfturbinen angetrieben wurden (Bild 1). Für amerikanische Rechnung entstanden in Emden außerdem schnelle Handelsschiffe (Typ Euroliner für Seatrain-Lines) mit automatisierten Gasturbinenantrieben [2]. Obwohl automatische Systeme in Landanlagen bekannt waren, wurden für Schiffe aufgrund der erhöhten Anforderungen durch den Schiffsbetrieb und das schnelle Durchfahren von verschiedenen Klimazonen deutlich höhere Anforderungen gestellt.
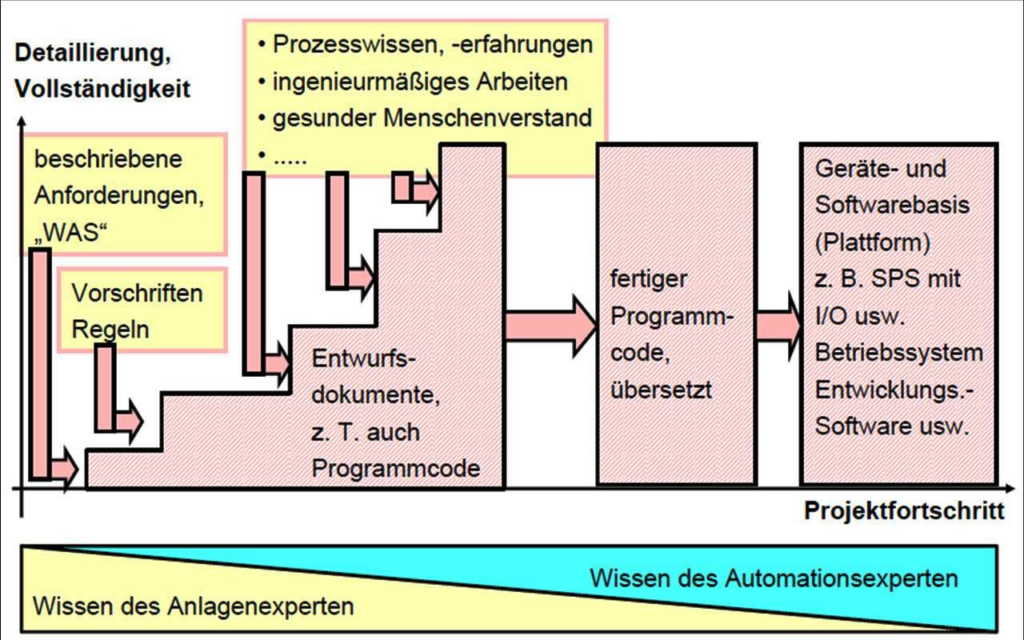
Abb. 3: Eine gute und offene Zusammenarbeit der Anlagen- und Automationsexperten ist die Voraussetzung bei der Entwicklungeiner neuen Automation (Quelle Prof. Ackermann)
Die Erfahrungen mit diesen Systemen führten zu verbesserten Automationsanlagen, die mit fortschreitender Technik besonders im Bereich der Rechner, Mikrorechner und Mikroprozessoren von den zentralen zu den autarken dezentralen Automationssystemen führten. Diese Technologien und Ergebnisse wurden in dem als „Schiff der Zukunft“ bezeichneten bedeutenden Forschungsvorhaben (Bild 2) von verschiedenen Firmen mit Berücksichtigung der Erfahrungen vom technischen Bordpersonal zusammengetragen [5, 6]. Die Redundanz wichtiger Systeme führte anschließend zu einer beträchtlich erhöhten Fehlertoleranz und in der Folgezeit wurden Verbesserungen besonders in den Bereichen Schnelligkeit, Fehlersuche und Optimierungen im Energieverbrauch und der Sicherheit erreicht.

Abb. 4: Durchflussmessung des Kühlwasservolumenstromes im Klimasystem eines sehr großen Fährschiffes (Foto Dr. Hochhaus)
Die Schiffsbesatzung konnte trotz der enorm wachsenden Schiffsgrößen und gestiegenen Antriebsleistungen aufgrund dieser Fortschritte von 1965 bis 2000 halbiert werden. Der Maschinenbetrieb wurde jetzt weitgehend wachfrei durchgeführt, und entsprechend ausgebildete Schiffsmechaniker konnten statt der Matrosen und Schmierer sowohl im Maschinenraum und auch an Deck für Wartungs- und Überholungs- und Konservierungsarbeiten eingesetzt werden. Der Wachdienst beschränkte sich auf die Brücke, im Maschinenbereich wurde der Wachdienst nur noch im Revierbetrieb durchgeführt. Es wurden Systeme zur Diagnose und Trendüberwachung bei den Schiffsantriebsanlagen und Hilfssystemen entwickelt und erprobt [7]. Sie setzten sich in den Folgejahren durch und mit den heutigen Systemen zur weltweiten Datenübertragung und Kommunikation sind daran auch die Motorenhersteller und andere Zulieferfirmen direkt oder indirekt beteiligt.
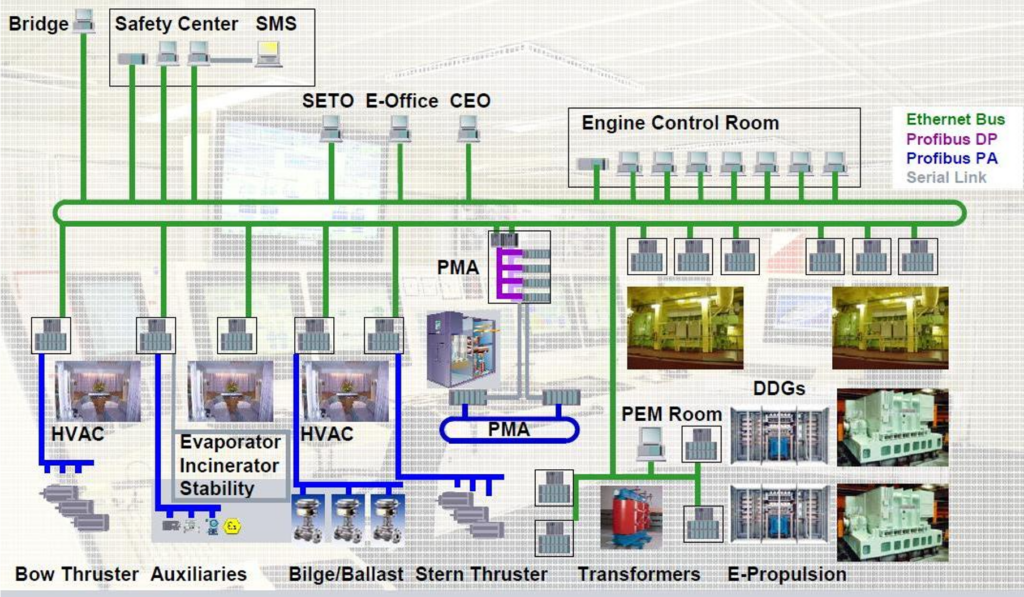
Abb. 5: Übersichtsgrafik zur Automation der wichtigsten Systeme eines Kreuzfahrtschiffes (Quelle Siemens)
2. Automation
Unter der Schiffsautomation wird die Anwendung einer übergeordneten technischen Einrichtung zur Überwachung, Steuerung, Regelung, Alarmierung und Dokumentation von unterschiedlichen schiffstechnischen Prozessen verstanden. Heutige Schiffe sind damit in verschiedenen Bereichen ausgestattet, auf der Brücke (Brückenautomation), im Maschinenraum (Hauptmaschinen-Automation, E-Erzeugungs-Automation) und auch bei anspruchsvollen Ladungen wie z. B. Kühlladung in Kühlschiffen (Ladungskühlanlagen-Automation) sowie in Kühlcontainerschiffen (Power Cable Transmission PCT) verstanden. Eine Automation besteht heute aus Soft- und Hardware, in denen Sensoren, Steuerungen und Regelungen integriert sind. Außerdem werden geeignete Ein- und Ausgabemöglichkeiten, Anzeigen, Alarmierungen und Protokolle zur Dokumentation benötigt. Wichtig bei der Entwicklung ist eine gute und offene Zusammenarbeit der Anlagen- und Automationsexperten (Bild 3).
2.1 Sensoren [8]
Die Sensoren dienen dazu, die physikalischen Größen der zu regelnden Prozesse zu messen und dem Regler die jeweiligen Istwerte mitzuteilen. Häufig sind es Temperaturen, Drücke, Kräfte, Drehzahlen und Drehmomente, Strom, Spannung, Leistung und Frequenz bei den elektrischen Anlagen sowie Volumenströme durch Leitungen (Bild 4), Füllstände von Tanks, aber auch die Schiffsgeschwindigkeit, Luftfeuchtigkeit, Salzgehalt bei der Trinkwassererzeugung aus Seewasser, Ölgehalt im ppm-Bereich bei Ölabscheidern, Luftpartikel bei Rauchmeldern und wie nachfolgend dargestellt auch der Sauerstoff- und Kohlendioxidgehalt in der Raumluft. Alle diese Größen werden mit unterschiedlichen Verfahren gemessen und direkt im Sensor oder nach geschalteten Wandlern in gut übertragbare und vergleichbare elektrische Größen gewandelt.
2.2 Steuerungen [8]
Charakteristisch bei einer Steuerung ist das offene System, da die durch die Steuerung bewirkte Veränderung der zu steuernden Größe kein Wirkung auf die Steuerung ausübt. Häufig werden Steuerungen von der Zeit beeinflusst. Einfaches Beispiel ist der Aufzug im Passagierschiff. Ein Passagier drückt die Ruftaste, die daraufhin aufleuchtet und eine Stromimpuls auslöst. Der Stromimpuls steuert über ein Relais und Schütz den Antriebsmotor des Aufzugs, der sich in Bewegung setzt.
2.3 Regelungen [8]

Abb. 6: Kommandobrücke, Blick auf den Fahrstand (Foto: W. Albers)
Bei der Regelung besteht im Gegensatz zur Steuerung ein geschlossenes System, d. h. die Veränderung der zu regelnden Größe (z. B. Temperatur) durch das Einschalten einer Heizung wirkt über die steigenden Temperatur zurück. Die Temperatur als Regelgröße wird über den Temperatursensor fortlaufend erfasst und mit dem Sollwert verglichen. Wird der eingestellte Temperatur-Sollwert erreicht, schaltet der Temperaturregler über die Stellgröße Schalter die Heizung wieder ab. Die anschließend wieder absinkende Temperatur bewirkt durch das stetige Messen und Vergleichen bei der Unterschreitung eines unteren Temperaturgrenzwertes wieder die Einschaltung der Heizung.
Einige aktuelle Beispiele der Automation aus verschiedenen Bereichen der Schiffe sollen dazu dienen, die derzeitigen Einsatzfelder und die große Breite der Automationsanwendungen zu zeigen (Bild 5).
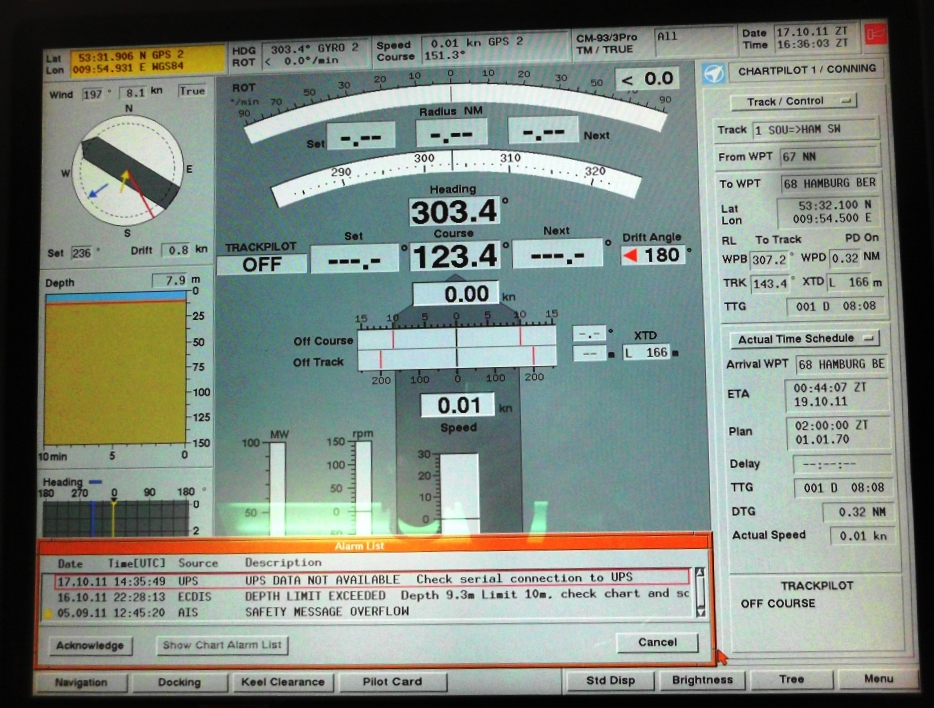
Abb. 7: Foto der Monitorgrafik des adaptiven Kursreglers auf einem 10.000-TEU-Containerschiff (Foto Dr. Hochhaus)
3. Brücke – adaptive Regelung
Es wird wenig über „Adaptive Regelungen“ berichtet, aber sehr intelligente Regelungen haben neben Ihrer Hauptaufgabe noch übergeordnete Nebenaufgaben. Wird z. B. die Brücke betrachtet, so wird hier über das Ruder der Kurs des Schiffes beeinflusst (Bild 6). Schon seit langer Zeit steht nicht der Steuermann oder ein Matrose am Ruder, sondern diese Arbeit erledigt der „eiserne Steuermann“, wie der Kursregler, der auf die Rudermaschine als Stellgröße einwirkt, auch bezeichnet wurde. Die Reglereinstellwerte, neben dem Sollkurs auch die Parameter für die Eigenschaften des Reglers werden abhängig von dem Wetter und dem Beladungszustand des Schiffes eingestellt. Sie stellen immer einen Kompromiss da und werden auf heutigen Schiffen von einer übergeordneten Adaption optimiert. Das Adaptionsziel kann z. B. ein möglichst geringer Brennstoffverbrauch bei vorgegebener Geschwindigkeit sein [9]. Daher benötigen adaptive Kursregler (Bild 7), die häufig mit einem übergeordneten Bahnregler verbunden sind, je nach Ausstattung weitere ständige Informationen über die zurückgelegte Strecke, die Geschwindigkeit, u. U. die Antriebsleistung, den Tiefgang und den derzeitigen Brennstoffverbrauch. Diese Daten sind in einer integrierten Brückenautomation in der Regel vorhanden und über entsprechende Schnittstellen abrufbar. In dem Speicher des Kursreglers sind Daten von vorhergehenden Reisen abgelegt und hier findet er ältere bereits optimierte Reglerparameter, die für ähnliche Tiefgänge und Wetterbedingungen gute Ergebnisse geliefert haben .
4. Maschinenraum – energetisch optimierte Kühlwasserregelung
Seit längerer Zeit werden drehzahlverstellbare Kühlwasserpumpen propagiert, da diese als Kreiselpumpen dem 3.-Potenzgesetz folgen. Das bedeutet, mit der Drehzahl wird der Fördervolumenstrom linear, der Druckverlust quadratisch und die Leistungsaufnahme des Pumpenantriebsmotors kubisch beeinflusst. Da die Pumpen (Bild 8) entsprechend den Vorschriften für den Nennpunkt (100% Leistung des Hauptmotors, 32 °C Seewassertemperatur) ausgelegt sind, wird also fast immer zuviel Kühlwasser gefördert, mit der Folge, dass ständig zuviel Leistung zum Pumpenantrieb benötigt wird [10]. Der Automation und der Regelung der Kühlwassertemperatur ist es egal, ob sie als Stellglied ein Drosselventil, ein Bypassventil oder einen Frequenzumrichter verstellt. Mit dem Frequenzumrichter wird die Drehzahl der Pumpe reduziert und folglich sinkt die aufgenommene Pumpenleistung mit der 3. Potenz. Damit wird eine energieoptimierte Kühlwasserregelung durchgeführt, die sich bei Kosten bewussten Reedern auch langsam durchsetzt.

Abb. 8: Kühlwasserpumpen im Schiffsmaschinenraum(Foto: W. Albers)
Die Regelung selbst beobachtet nur den Temperatursensor im Kühlwasser, vergleicht ständig die gemessene Kühlewassertemperatur mit der über den Sollwert eingestellten Temperatur und sorgt über sein Stellglied für einen größeren oder kleineren Kühlwasservolumenstrom. Früher waren die Wachingenieure und die Ingenieur-Assistenten auf ihren Wachen rund um die Uhr u. a. für diese Aufgaben zuständig. Mit der Einführung der automatischen Regelung und Automation der Maschinenanlage wurde der wachfreie Berieb ermöglicht und der Hauptmotor merkt nicht, wie seine Kühlwassertemperatur eingestellt wird.
6. Ladung- kontrollierte Atmosphäre
Bei anspruchsvollen Ladungen wie Papier, Kaffe, Kakao und Kühlgütern verlangt der Verlader von der Reederei und Schiffsleitung eine Fürsorge, die aufgrund der heutigen Besatzungsstärken nur noch von einer geeigneten Automation erfüllt werden kann. Dabei wurden sehr flexible und aufwendige Anlagen eingesetzt, die zeitweise und nur im Fall von entsprechender Ladung an Bord genommen wird. So wurden einige Kühlschiffe mit normal isolierten aber extrem luftdichten Laderäumen gebaut, um neben der Kühlung auch den Sauerstoffgehalt der Atmosphäre abzusenken. Damit wird die von dem Stoffwechsel der Früchte abhängige Reifung zusätzlich gebremst, es ergibt sich eine längere Haltbarkeit.
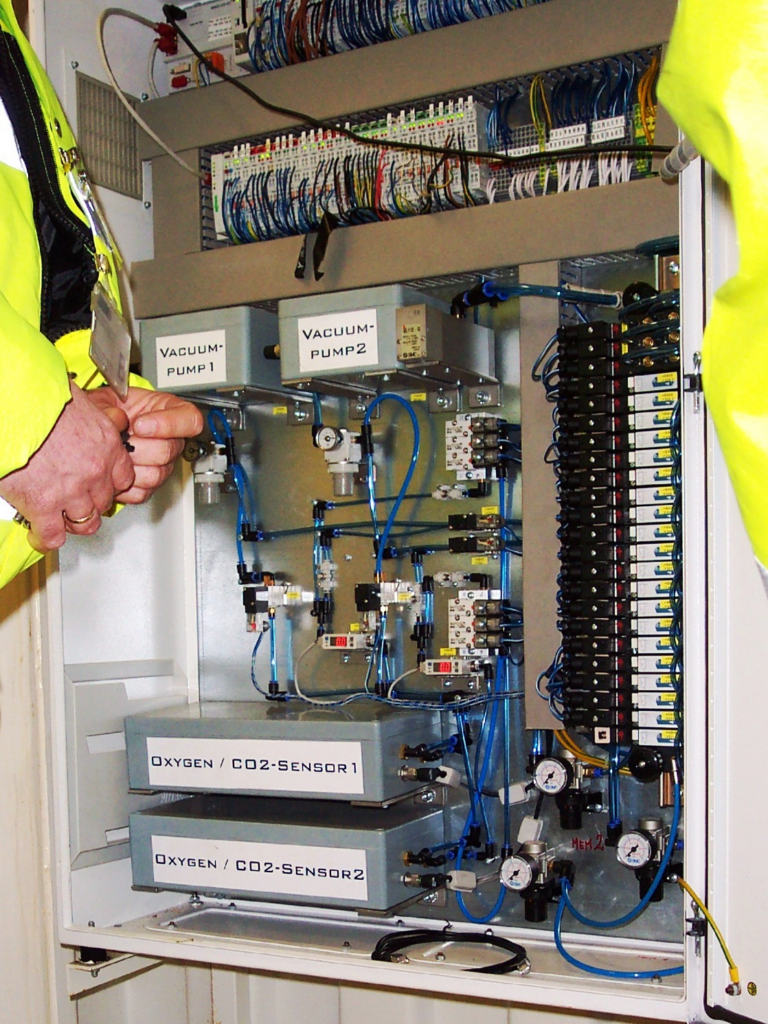
Abb. 9: Blick in den Schaltschrank mit den Sensoren zur Aufbereitung und Wandlung der O2- und CO2-Messdaten eines CA-Kühlschiffes (Foto Dr. Hochhaus)
Diese seit über 100 Jahren bekannten Lager- und Transportmöglichkeiten wurden erst in den vergangenen 25 Jahren in der Schifffahrt eingeführt. Erst dann standen bezahlbare Sensoren und Mikroprozessoren zur Verfügung (Bild 9), um die komplizierten Vorgänge messtechnisch zu erfassen und die sauerstoffarme Laderaumatmosphäre mit der richtigen Regelstrategie einzustellen und zu halten. Einige Früchte und vielleicht zukünftig auch Schnittblumen mit stark begrenzter Haltbarkeit können so statt mit dem Flugzeug mit dem Schiffe transportiert werden [11].
Es wurden Anstrengungen unternommen, diese Technologie auch in Kühlcontainern anzuwenden. Die Fortschritte der Mikroelektronik führten zu kleineren Prozessoren, Speichern und anderen Baukomponenten. Die Sensoren wurden intelligenter, zum Teil mit automatisch kalibrierenden Programmen ausgestattet und sanken im Preis. Zuverlässige Kühlcontainer mit geregelter Feuchte aber auch mit modifizierter Atmosphäre sind dank anspruchsvoller Regelung seit einigen Jahren am Markt. Sie arbeiten vollautomatisch und können die Temperatur der Kühlgüter gut regeln und auch den Sauerstoff- und Kohlendioxydgehalt in bestimmten Grenzen einstellen. (Bild 10)
6. Kühlcontainerladeraum

Abb. 10: Star Cool CA, Maersk Container Industry produziert in eigenen Fabriken Kühlcontainer, die mit sauerstoffarmer Atmosphäre arbeiten (Foto Dr. Hochhaus)
Eine andere aufwendige Automation zum Transport von Kühlcontainern in den Laderäumen von Containerschiffen befindet sich derzeit im Entwicklungsstadium [12]. Hintergrund ist die von den Kühlcontainern abgegeben Wärme, die den Laderaum schnell auf 50 – 60 °C aufheizen würde. Etwa bei diesen Temperaturen gehen die Kühlcontainer in Störung, um die Container eigene Kälteanlage vor der Zerstörung zu schützen. Daher wird der Kühlcontainerladeraum mit Einsatz von Ventilatoren durch Frischluftzufuhr seltener durch Wasser gekühlt. Im einfachsten Fall werden alle Laderaumlüfter eingeschaltet, sowie aktive Kühlcontainer im Raum stehen.
Denn der elektrische Leistungsbedarf der Kühlcontainer erhöht sich mit steigender Umgebungstemperatur im Laderaum. Nun ist es eine schwierige Aufgabe, den Mehrverbrauch an elektrischer Leistung der einzelnen Kühlcontainer mit dem elektrischen Leistungsbedarf der Laderaumlüfter zu vergleichen, um durch Ab- und Zuschalten der Laderaumlüfter den energetisch optimalen Zustand herzustellen. Die Aufgabe wird dadurch erschwert, da das Schiff im Verlauf einer Rundreise verschiedene Klimazonen und den Äquator durchfährt und auch die Belegung der Laderäume mit Kühlcontainern richtungs- und saisonabhängig variiert.
7. Passagiere – optimierte Belüftung auf Kreuzfahrtschiffen
Auf Kreuzfahrtschiffen wird zur Luftversorgung im Maschinenbereich und zur Klimatisierung der Aufbauten ein hoher technischer und energetischer Aufwand getrieben. Hier spielt der Luftvolumenstrom eine wichtige Rolle, der den Kabinen und öffentlichen Räumen von der Klimaanlage (Bild 11) zugeführt wird und von den Umgebungsbedingungen und der Raumbelegung abhängig ist. Wie bei der Kühlwasserregelung lässt sich beim Einsatz der Frequenzumrichter bei den Ventilatoren viel elektrische Leistung einsparen. Eine weitere Energieeinsparmöglichkeit ergibt sich bei der Kältezufuhr und Luftentfeuchtung. Allerdings ist die richtige Sensorik hier wichtig, denn neben der Temperatur und Luftfeuchte sind auch der Sauerstoff- und Kohlendioxidgehalt interessante Regelparameter. Letztere sagen etwas über den Frischluftgehalt in großen Räumen aus und spielen bei dem Behaglichkeitsgefühl der Menschen in schwierig zu klimatisierenden Bereichen wie dem Schiffsrestaurant oder im bordeigenem Theater eine entscheidende Rolle.
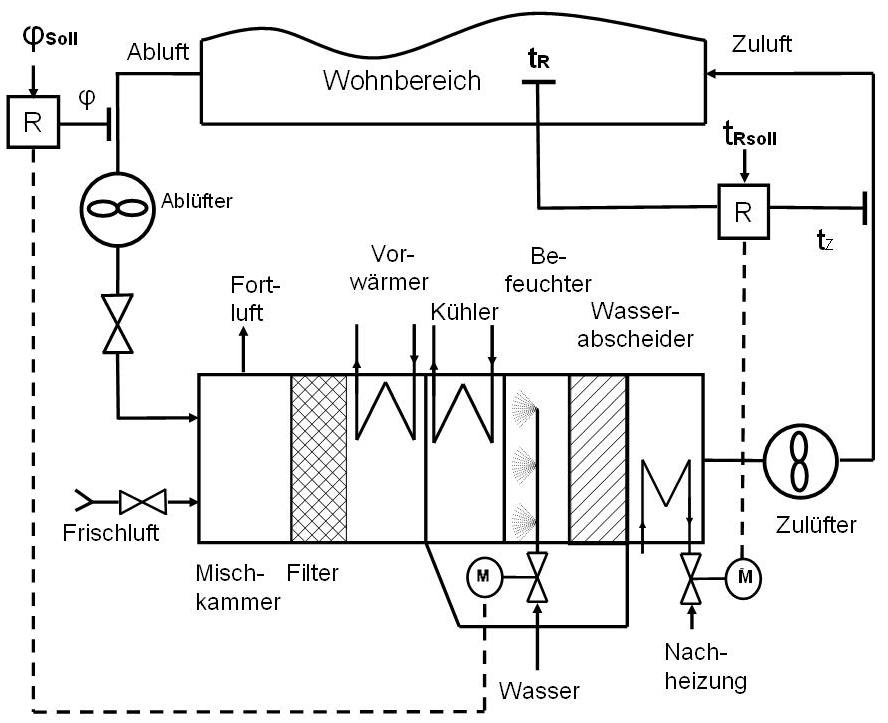
Abb. 11: schematische Darstellung einer Schiffsklimaanlage (Grafik Dr. Hochhaus)
Mit der Tatsache, dass die Klimatisierung bei den Kreuzfahrtschiffen nach der Schiffsantriebsanlage den größten Energieverbraucher darstellt [13, 14], wird zur Zeit an einer energetisch optimierten Regelstrategie gearbeitet. Damit soll eine verbesserte Automatisierung der Klimaanlagen ermöglicht werden, die unter Berücksichtigung der Umwelt und zeitlicher Raum- und Kabinenbelegung ein Optimum an Energieaufwand und Behaglichkeit darstellt.
8. Zusammenfassung und Ausblick
Dieser kurze Überblick geht nach einem kurzen Rückblick auf die Definitionen ein und zeigt, wie schnell die Automation sich die Schifffahrt erobert hat. Die angeführten Beispiele dokumentieren den Stand um 2010 in einigen schiffstechnischen Bereichen. Da auf automatisierten Schiffen die Zahl der Besatzungsmitglieder aufgrund des wachfreien Betriebes und der integrierten Besatzung nahezu halbiert wurden, waren die Reeder schnell vom Nutzen überzeugt. Die derzeitige Weiterentwicklung einer intelligenten Automation erfolgt primär mit den Zielen, die Schiffssicherheit und das Wohlbefinden der „Ladung und Passagiere“ zu steigern sowie den Energieverbrauch zu reduzieren.
Seit 2010 verschiebt sich der Schwerpunkt hin zum nachhaltigen Schiffsbetrieb zur Vermeidung von Schwefel und Reduzierung von Stickoxiden im Abgas. Zehn Jahre später werden Anstrengungen sichtbar, um den CO2-Ausstoß zu minimieren (Alan G) und ganz zu vermeiden (Methanol, Ammoniak).
Literatur
[1] Augustin, H.: Einzelautomatiken und Rechnereinsatz für den Ladungskühlbetrieb, Hansa Heft 8, 1967, Schiffahrts-Verlag »Hansa«
[2] Müller, C.: Automatisierte Gasturbinenantriebe mit Wellengeneratoren für schnelle Handelsschiffe;
[3] Aschpurwis, D., Hellwich, P.: Automatische Brückenfernsteuerung unter Verwendung von Mikroprozessoren; Hansa Heft 1, 1978, Schiffahrts-Verlag »Hansa«
[4] von Thienen, K.: Steuerung und Regelung mit Mikrocomputern in der Schiffstechnik, STG Jahrbuch Band 72, 1978
[5] Damaschke, R.: Systemstandardisierung von Automationsanlagen auf Schiffen; STG Jahrbuch Band 78, 1984
[6] N.N.: Ergebnisse des Forschungs- und Entwicklungsvorhabens, Schiff der Zukunft; Herausg. Germanischer Lloyd, Hamburg 1986,
[7] Müller, H., Reetmeyer, H.: Wissensbasierte Systeme in der Schiffsbetriebstechnik, STG Jahrbuch Band 88, 1994
[8] Ackermann, G.: Mess-, Steuer- und Regelungstechnik, in Handbuch Schiffsbetriebstechnik (S. 661-702), 2006 Hamburg, Seehafen Verlag
[9] Droste, W.: Meßmethoden für Treibstoffverbrauch als Grundlage für Kursregleradaption
STG Jahrbuch Band 77, 1983
[10] Hochhaus, K.-H., Mehrkens, J.D.: Kühlwassersysteme auf Motorschiffen, in Handbuch der Werften, Band 23; Schiffahrts-Verlag »Hansa«
[11] Hochhaus, K.-H., Glandien, H.: Cool, Reefertechnik mit Zukunft ; 2006 Seehafen Verag; ISBN 978-3-87743-818-3
[12] Jacobsen, O.: Energieoptimierung der Laderaumlüftung auf Kühlcontainerschiffen; Vortrag auf der STG-Hauptversammlung, 2011 in Rostock
[13] Behrens, V., Hochhaus, K.-H., Wild, Y.: Schiffsbelüftungs- und Klimaanlagen, in Handbuch der Werften, Band 25; Schiffahrts-Verlag »Hansa«
[14] Salge, H.: Energiesparende Automation. Steuerung von Schiffsklimaanlagen, STG-Sprechtag „Energieeffiziente Klimatisierung von Schiffen“ am 19.10.2011 in Bremerhaven



